
Thèmes de recherche: Geste, mouvement et 3D
Experts:
Pr T. Dutoit, Dr S. Laraba, Dr M. Mancas, Dr V. Vandenbulcke
Défis de recherche

- avec des marqueurs
- Inertie : Xsens
- Optique : Optitrack, Qualisys
- Sans marqueur
- Kinect V1 et V2
- Mouvement de saut
- OpenPose (2D – 3D)
Thèses de doctorat
- Dr Alexis Moinet
- Dr Jerome Urban
- Dr Christian Frisson
- Dr Mathilde Brousmiche
Projets
- FEDER/DigiSENSE
- WALLINOV/ParkAR
Experts:
Pr T. Dutoit, Pr S. Dupont, Dr S. Laraba, Dr M. Mancas
Défis de recherche
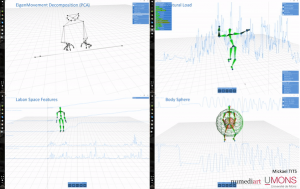
- Obtenir des descripteurs de gestes
- Filtrage et nettoyage automatiques des données mocap
- Analyser le style/l’émotion dans les mouvements du corps
Thèses de doctorat
- Dr Mickael Tits
Projets
- EU-FP7/ Itreasures
- MotionMachine
- RW/WallInnov/ParkAR
Experts:
Pr T. Dutoit, Dr S. Laraba
Défis de recherche

- Reconnaissance automatique des gestes à partir de données de squelette 2D ou 3D
- IA explicable
- Sous-titrage automatique des vidéos de football
Thèses de doctorat
- Dr Sohaib Laraba
Projets
- ONS2015/GiantPlay
- Wallinov/DeepSport [https://sites.google.com/view/soccercaptioning/home]
Experts:
Pr T. Dutoit, Dr S. Laraba
Défis de recherche
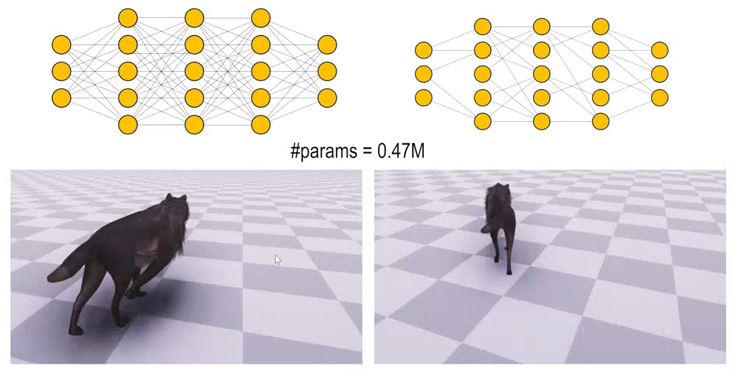
- Synthèse automatique du mouvement à partir des signaux de commande
- Évaluation de la qualité de la synthèse
- Transfert de style
Thèses de doctorat
- Antoine Maiorca
Experts:
Pr T. Dutoit, Dr S. Laraba
Défis de recherche

- Géolocalisation et tracking indoor
- Analyse des interactions sociales
- Collaboration multi-utilisateurs en VR
- Définir des catégories relationnelles dans l’expérience de visite muséale
- Analyse des activités dans les salles de classe
Thèses de doctorat
- Ratha Siv
- Marine Lagasse
- François Rocca
Projets
- Win2Wal/SmartVRPark
- Beware/ViewSkyModel
Experts:
Pr B. Gosselin, Dr M. Mancas, Dr V. Vandenbulcke
Défis de recherche
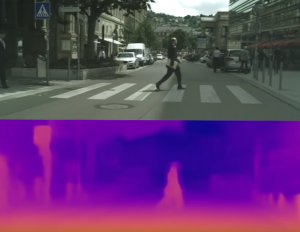
- Reconstruction 3D basée sur SLAM
- Prédiction de profondeur à partir d’images 2D
- Détection d’anomalies par drone
- Apprentissage en profondeur explicable basé sur les bords pour la détection et la prédiction d’actions en temps réel
Thèses de doctorat
- Dr Ambroise Moreau
- Mohammed El Amine Mokhtari
- Mohammed Benkedadra
Projets
- Beware/ViewSkyModel
- Win2Wal/DroneSecurity
- PPP/Infrabel